Workshop # 5

Interpolation-based techniques for constrained control: from improved vertex control to robust model predictive control alternatives.Organizers: Hoai-Nam Nguyen, Sorin Olaru and Per-Olof Gutman
The present workshop intends to present the latest developments on a topic with a renewed interest in the last years: the interpolation based control. Here, the strength of interpolation based control will be demonstrated for a large class of fundamental control problems covering the state/output feedback control of uncertain linear systems, including time varying and parameter varying systems with a specific attention to the presence of constraints on the outputs, states, and control inputs. The one-day event will present historical elements of constrained control and bring gradually the auditorium to the recent challenges in the optimization-based control design related topic. The auditorium will be introduced to the theoretical foundations of a generic interpolation scheme and subsequently will be exposed to the analysis of structural implications and the computational aspects of the resulting control law for various classes of dynamical systems. The participants will have the opportunity to compare the features of novel methodologies with respect to classical alternatives as vertex control or Model Predictive Control in their implicit or explicit formulations. In addition, the participants will attain the basis to apply computational tools to the design of robust interpolating controllers for uncertain linear systems with state and control constraints.
SpeakersHoai-Nam Nguyen (Automatic Control Department, SUPELEC, France)
Sorin Olaru (Faculty of Civil and Environmental Engineering, Technion, Haifa, Israel) Per-Olof Gutman (Faculty of Civil and Environmental Engineering, Technion, Haifa, Israel) Duration & dateFull-day: June 24, 2014
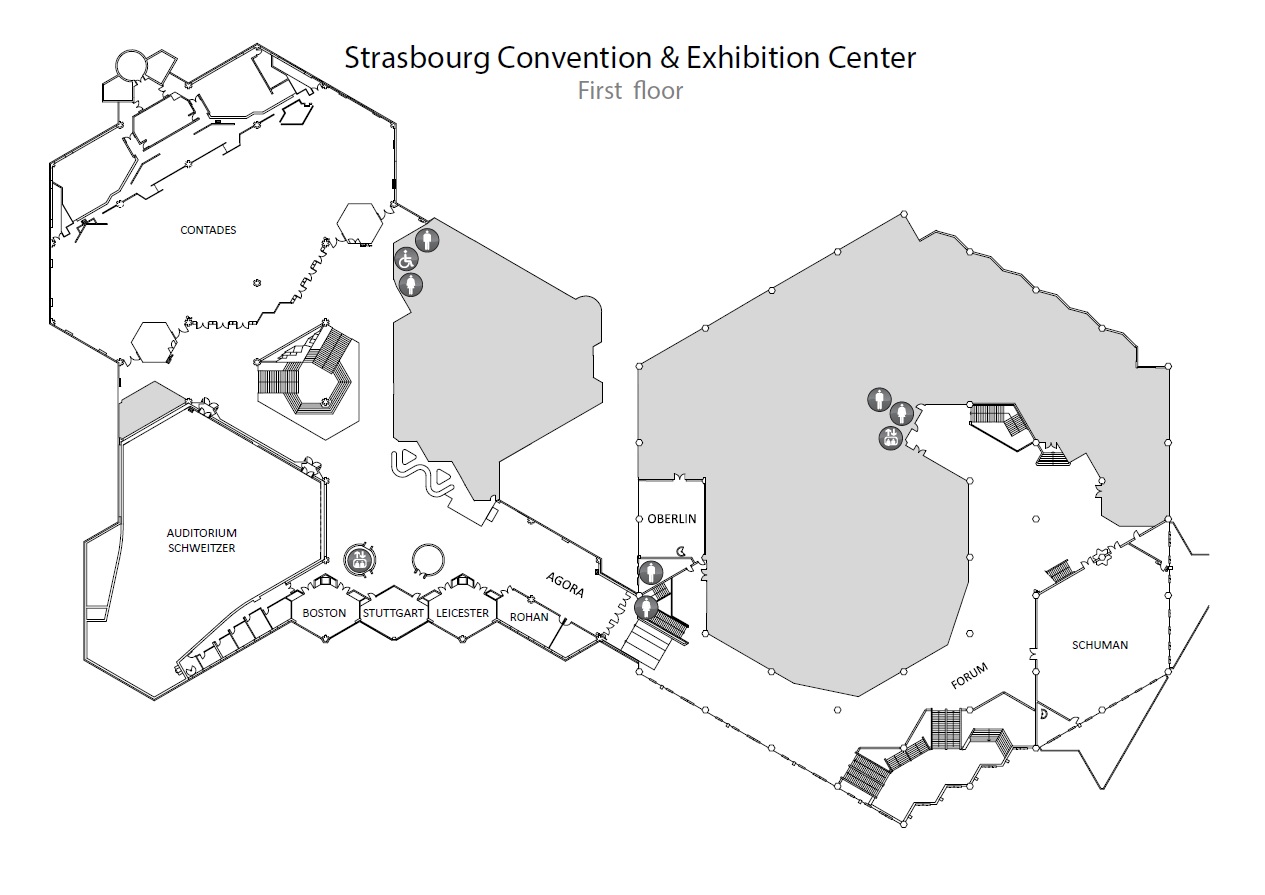
LocationRegistration feesProgram
8:00 Welcome
8:30 Introduction to constrained control, set invariance and optimization-based control design, Per-Olof Gutman 9:30 Interpolation based control for linear time-invariant systems in presence of input and state constraints described by polyhedral sets, Sorin Olaru 10:15 Morning break 10:30 Structural properties, geometrical insights and numerical aspects. Implicit and explicit solutions of interpolation based control laws, Sorin Olaru 11:15 Basic routines and illustrative numerical examples, Hoai Nam Nguyen 12:00 Lunch break 13:30 Hands-on exercise 1 using Matlab, Hoai-Nam Nguyen, Sorin Olaru and Per-Olof Gutman 14:30 Robust constrained control based. Parametric uncertainty; the additive disturbance and switching dynamics, Hoai Nam Nguyen (1 hour) 15:30 Afternoon break 16:00 The output feedback problem and implications in constrained control, Per-Olof Gutman 16:45 Hands-on exercises using Matlab, Hoai-Nam Nguyen, Sorin Olaru and Per-Olof Gutman 17:30 Open problems and research directions. Application challenges, S. Olaru, H. N. Nguyen and P.O Gutman 18:15 End of Workshop The exercises will be done individually on the participant's own computer that should be preloaded with Matlab. |


|
- HOME
- ABOUT ECC
- PROGRAM
- PLENARY TALKS
- LUNCH SESSIONS
- AWARDS
- WORKSHOPS
- MATHWORKS TUTORIAL
- SUBMIT
- REGISTER
- SPONSORSHIP
- EXHIBITORS
- ATTENDEES
- CONTACT
- DOWNLOAD
- SUBSCRIBE
- JOBS
- APPS
- PHOTOS







{kind=link}